春节期间,有点时间,进一步浏览了这本书,其完整的名字是:《21世纪定位导航授时(PNT)技术:卫星导航、传感器系统和民事应用之集大成》,两卷本,共分六篇,计64章。《21世纪PNT技术》第一卷是围绕卫星导航阐述的,共分三篇:卫星导航系统,卫星导航技术,与卫星导航工程和科学应用,计34章,包括系统篇13章,技术篇13章,和应用篇8章。《21世纪PNT技术》第二卷是围绕集成导航系统来说的,也分为三篇:无线电机会信号PNT,非无线电机会信号PNT,与面向消费者和商业应用的PNT,计30章,包括使用无线电机会信号的PNT9章,使用非无线电机会信号的PNT11章,与面向消费者和商业应用的PNT10章。全书的大部分章节均配有大量的丰富多彩的图片和表格,令人读起来兴趣盎然,目不暇接。
《21世纪PNT技术》的主要目录(不含章节)如下:
第1卷:卫星导航系统,及其技术和应用
第一篇:卫星导航系统
第二篇:卫星导航技术
第三篇:卫星导航在工程和科学中的应用
第2卷:集成导航系统,及其技术和应用
第四篇:使用无线电机会信号的定位、导航和授时
第五篇:使用非无线电机会信号的定位、导航和授时
第六篇:面向消费者和商业应用的定位、导航和授时
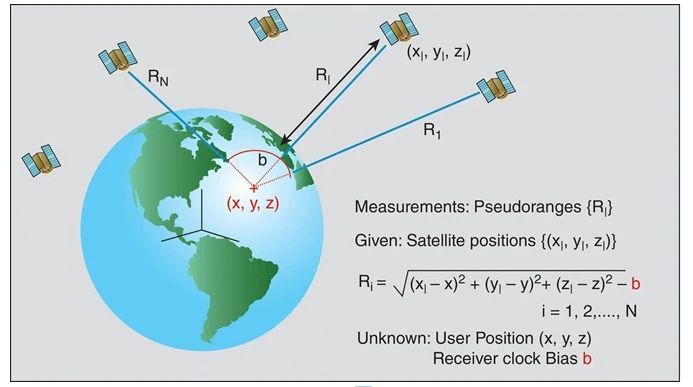
第一篇由13章组成,是从GPS和其他相关PNT发展的历史视角开始,描述了所有全球和区域导航卫星系统(GNSS和RNSS)的基本原理和最新发展,实现其共存和互利的设计策略、信号质量监控、卫星轨道和时间同步,以及提供改正信息提高导航解决方案精准度和完好性的星基和地基增强系统。
第二篇也包含13章。它们全面回顾了卫星导航接收机技术的最新进展,例如接收机体系结构、信号跟踪、矢量处理、辅助和高灵敏度GNSS、精密单点定位和实时动态(RTK)系统、直接位置估计技术,以及GNSS天线和阵列信号处理。还涵盖了有关多路径丰富的城市环境、处理欺骗和干扰,以及确保PNT完好性的挑战的主题。
第三篇包含8章。用卫星导航工程和科学应用来完成本卷。对全球大地测量学和参考系的回顾,为大地测量科学的广泛讨论奠定了基础,随后是关于基于GNSS的时间和频率分配的重要主题。GNSS信号为对流层、电离层和地球表面监测提供了一种流行的被动传感工具。其中有三章专门介绍恶劣天气、电离层效应和危险事件监控。最后,对GNSS无线电掩星和反射法进行综合处理提供描述。
第2卷中的三个篇,介绍了使用无线电和非无线电替代信号和传感器以及面向消费和商业应用的PNT和集成PNT技术。第四篇共分9章,其中概述一章提供了该卷内容安排的动机和组织方式,随后是一章是有关导航系统建模和传感器集成中经常使用的非线性估计方法。该篇讨论了从地面、飞机或低地球轨道(LEO)卫星发射的各种无线电信号用于PNT的目的。这些信号中有许多是用于其他功能的,例如广播、联网以及成像和监视。在第五篇中,共有11章,涵盖了以无源和有源模式工作的各种非射频传感器,以产生导航解决方案,包括MEMS惯性传感器、时钟技术的进步,和磁力计、激光成像、LiDAR、数字摄影测量和来自天体的信号。关于GNSS / INS集成方法的多种方法的教程式章节也在内。还有的是有关导航和动物导航的神经科学的章节。最后,在第六篇中,共有10章,展示了有关当代PNT应用(如测量和移动)的工作集合:制图,精密农业,可穿戴系统,自动驾驶,火车控制,商用无人机系统,航空,卫星轨道确定和编队飞行以及在独特的北极环境中的导航。
以下将若干有点新意的章节作挂一漏万的介绍。第十六章“向量处理”。与标量跟踪相比,矢量跟踪具有许多优势。矢量处理有多种不同的实现方式,本章对这些实现方式进行了概述。概念设计、体系结构处理、算法细节实现,和测试结果均使用了仿真和实际数据并且对于矢量延迟锁定环(VDLL)、矢量延迟频率锁定环(VDFLL)和矢量锁相环(VPLL)的性能分析都作了叙述。形成混合矢量标量架构很方便,可以将VDFLL码相位和载波频率跟踪的鲁棒性与标量锁相环的精度相结合。描述了三种混合矢量标量体系结构:VFLL辅助PLL、本地载波相位卡尔曼滤波器级联VDFLL和联合载波相位跟踪。此处介绍的三种混合矢量-标量接收机体系结构,旨在提供相干载波相位测量,同时探索利用VDFLL的鲁棒性。
第二十一章“位置直接估算”。
本章介绍了一种创新概念,可以帮助克服标准全球导航卫星系统(GNSS)定位、导航和授时方面的一些关键挑战和局限性。本章描述了所使用的信号模型以及适用于标准GNSS接收机的信号处理基础,介绍直接位置估计(DPE),其中提供了有关信号模型和直接定位概念的大量详细信息。此外,它提供了理论结果,证明了DPE在两步法方面的性能增强。还讨论了实现细节,作者从纯粹的理论结果转向更实际的方面。它还讨论了DPE的一些变体和替代应用。第二十九章“时间和频率信息的分发”。本章介绍了许多发布方法,可用于分配时间和频率信息,以校准或同步本地时钟。主要重点是使用来自全球导航卫星的信号的方法,主要是来自美国GPS卫星的信号。准确性声明应得到可追溯性文档的支持,本章还将对此进行描述。有许多方法可用于评估信道延迟或消除其影响,并对其进行了讨论。通过双向方法衰减通过天线和接收机的时间延迟,并且如果两个终端站的延迟相等,则它们的延迟将完全抵消。本章讨论定义每种同步策略的注意事项,然后提供一些基于实际数据的示例。所有同步策略的基础是本地时钟振荡器的自由运行稳定性。第三十九章“大都市专用信标系统的PNT”。大都市信标系统(MBS)代表了这一类新的增强技术,旨在成为成本最低、可扩展性最高的技术,可在其覆盖范围内提供高度可靠的定位、导航和授时。本章讨论了MBS的总体体系结构。它提供了MBS信号结构的详细概述。由于MBS信号结构与GPS信号结构的相似性,因此将描述两种信号的各种特征。本章介绍了一个接收机体系结构示例,以及实现接收机以处理基于地面的信号的相关挑战。它还描述了MBS接收机的辅助操作模式。本章讨论了使用MBS信号进行时间和频率同步。它显示了引用MBS信号的各种行业标准。第四十三章“低地球轨道导航”。其第1部分为:概念,与当前能力和未来承诺,重点介绍从低地球轨道(LEO)导航。它以简短的历史介绍了LEO中美国和俄罗斯的早期卫星导航系统。还讨论当今LEO中的卫星,它们在导航中的作用以及地平线上的LEO星座。它提供了所需的数学背景,并讨论了LEO在当今卫星导航中的作用,展示了基于铱星的GPS增强系统的性能,并展示了更强信号的益处。并展望了LEO在导航领域的未来,并证明了拟议的宽带LEO星座的规模,加上更良性的LEO辐射环境,可以提供具有商用货架组件的GPS定位性能。与中地球轨道相比,它提供了对LEO辐射环境的分析。其第二部分为:模型,实现和性能。在过去的十年中,已经证明了宽带低地球轨道(LEO)卫星信号用于定位、导航和授时的前景。这里介绍LEO卫星接收机的伪距、载波相位和多普勒测量模型。它简要概述了LEO卫星的轨道动力学,该动力学在导航过滤器中用于估计同时跟踪和导航(STAN)框架中的LEO卫星的状态。还讨论影响STAN框架导航性能的误差源。它概述了现有的Orbcomm LEO卫星星座,并描述了如何估计这些卫星的多普勒测量值。并且还根据SpaceX向联邦通信委员会提交的文件,概述了拟议的Starlink星座。它制定了载波相位差分LEO框架,分析了一些现有和未来的LEO卫星星座对精度的位置稀释。第四十六章“GNSS‐INS集成”。其第1部分为:GNSS‐INS集成的基础知识,讲述GNSS接收器在城市环境和茂密的树叶下容易受到干扰、欺骗、视线遮挡和多径反射的影响。本章介绍最流行的GNSS增强方法,该方法与惯性导航系统(INS)集成。它评述了惯性导航的主要原理,并分别开发了基本的INS误差传播模型。本章描述了松散、紧密和深入耦合的导航机制。然后介绍了两个案例研究,其中包括用于城市导航的GNSS / INS集成,其中包括使用消费级微机电系统惯性传感器,以及在茂密林区进行导航的深度集成。GNSS / INS集成的主要目标是实现一种导航机制,在兼顾其优点的同时消除其缺点;其第2部分为:使用分段方法的GNSS / IMU集成,介绍了全球导航卫星系统/惯性测量单元(GNSS / IMU)集成,与之前的所有其他集成方法不同,它首先考虑了鲁棒性、灵活性和互操作性。滤波器的拓扑被分段、载波相位的顺序变化仅用于动力学,以提供精确的速度历史记录。过程噪声与卡尔曼滤波器的有效“内存”(在此应用中允许进行估计以容忍未建模的IMU降级)之间的对应关系至关重要。它提供了一种方法来解释为何IMU质量的显着提高并不能在覆盖率良好的情况下按比例提高卫星导航/ IMU精度。第五十八章“高级驾驶员辅助系统中的导航和自动驾驶”。本章简要概述了导致车辆自动化工作激增的历史,随后讨论了基本车辆模型和车辆自动化导航示例。如今,先进的驾驶员辅助系统,例如车道偏离警告、车道保持辅助、自适应巡航控制和协作自适应巡航控制,已进入许多生产车辆。除了标准定位之外,GNSS信号处理还提供了一系列用于车辆导航、估计和控制的其他测量。本章重点介绍了GNSS测量的一些应用。它介绍了横向车辆建模,因为它适用于自动驾驶导航和控制的车辆状态估计。自动驾驶还具有最终减轻驾驶任务的潜力,使通勤者可以将花费在车辆上的时间用于进行更有成效或休闲的活动。第六十章 “商用无人机系统”。本章重点介绍自动执行地理空间约束所需的功能,以避开静态障碍物和指定为禁飞区的指定位置。大多数商业无人机系统(UAS)的禁飞区示例,包括机场、军事基地、城市环境以及人口稠密的地区。本章介绍了“规避”或“感知与规避”(也称为“检测并规避”)的法规环境,量化了“清晰”的概念,描述了操作避撞系统,并简要介绍了回顾最近的研究工作。飞行管理系统包括轨迹预测、性能计算,制导和高级导航功能。远程驾驶飞机是UAS的子类别,它指定飞行员参与飞行器的操作,但不在机上。通常,尺寸、重量、功率和成本约束限制了UAS导航有效载荷的选择。







 环球新时空
环球新时空 斗室智库
斗室智库